基于單線激光雷達(dá)和單目視覺的負(fù)障礙檢測(cè)算法
推薦 + 挑錯(cuò) + 收藏(0) + 用戶評(píng)論(0)
近年來,無人車成為熱門研究方向。障礙物檢測(cè)是無人車研究中的一個(gè)重要組成部分,無人車行駛的環(huán)境主要包括結(jié)構(gòu)化道路(城市街道、高等級(jí)公路)和非結(jié)構(gòu)化道路(越野道路)。障礙物主要分為正障礙和負(fù)障礙,正障礙指凸起于地面的物體,而負(fù)障礙一般指像坑、溝渠、陡峭的下坡這樣的場(chǎng)景。由于負(fù)障礙位于車載傳感器難以測(cè)量的地面下方,因此一定距離上的負(fù)障礙檢測(cè)仍具有很大挑戰(zhàn)。
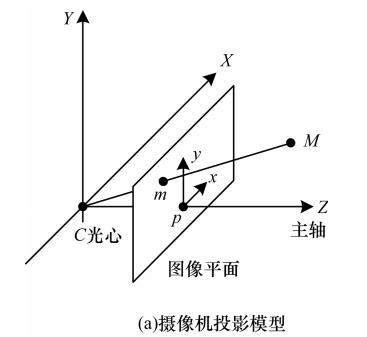
近年來,無人車成為熱門研究方向,而負(fù)障礙物檢測(cè)是地面無人車環(huán)境感知與理解的任務(wù)之一。為此,提出一種基于單線激光雷達(dá)和單目視覺的負(fù)障礙檢測(cè)算法。為彌補(bǔ)單線激光雷達(dá)在覆蓋能力方面的不足,對(duì)檢測(cè)到的負(fù)障礙區(qū)域在攝像機(jī)畫面中進(jìn)行跟蹤,結(jié)合跟蹤結(jié)果對(duì)負(fù)障礙區(qū)域做進(jìn)一步判別。實(shí)驗(yàn)結(jié)果表明,該算法在多種實(shí)驗(yàn)場(chǎng)景下?lián)碛?6%以上的負(fù)障礙檢測(cè)準(zhǔn)確率,可有效應(yīng)用于微小型地面無人車輛。
非常好我支持^.^
(0) 0%
不好我反對(duì)
(0) 0%
下載地址
基于單線激光雷達(dá)和單目視覺的負(fù)障礙檢測(cè)算法下載
相關(guān)電子資料下載
- 歡創(chuàng)播報(bào) 特斯拉二代機(jī)器人亮相 287
- 中國激光雷達(dá)廠商引領(lǐng)全球車載市場(chǎng):禾賽獨(dú)占鰲頭,華為位列前五 146
- 研究人員提出一種電磁微鏡驅(qū)動(dòng)系統(tǒng) 526
- 深圳北站智能化升級(jí):巡檢機(jī)器人上崗,明治激光雷達(dá)“護(hù)航”避障 47
- 口罩佩戴檢測(cè)算法 55
- 除了“上車”,毫米波雷達(dá)還可以有很多選擇 78
- 我國科學(xué)家實(shí)現(xiàn)激光雷達(dá)系統(tǒng)研制重大突破 28
- 我國科學(xué)家實(shí)現(xiàn)激光雷達(dá)系統(tǒng)研制重大突破,SK海力士計(jì)劃2028年前投資103萬億韓 30
- 激光雷達(dá)VS毫米波雷達(dá),一文讀懂! 32
- 264億元!國產(chǎn)激光雷達(dá)占全球84%市場(chǎng)份額!這家中國公司蟬聯(lián)全球第一已被制裁 143